
13
Up to 13 parameters
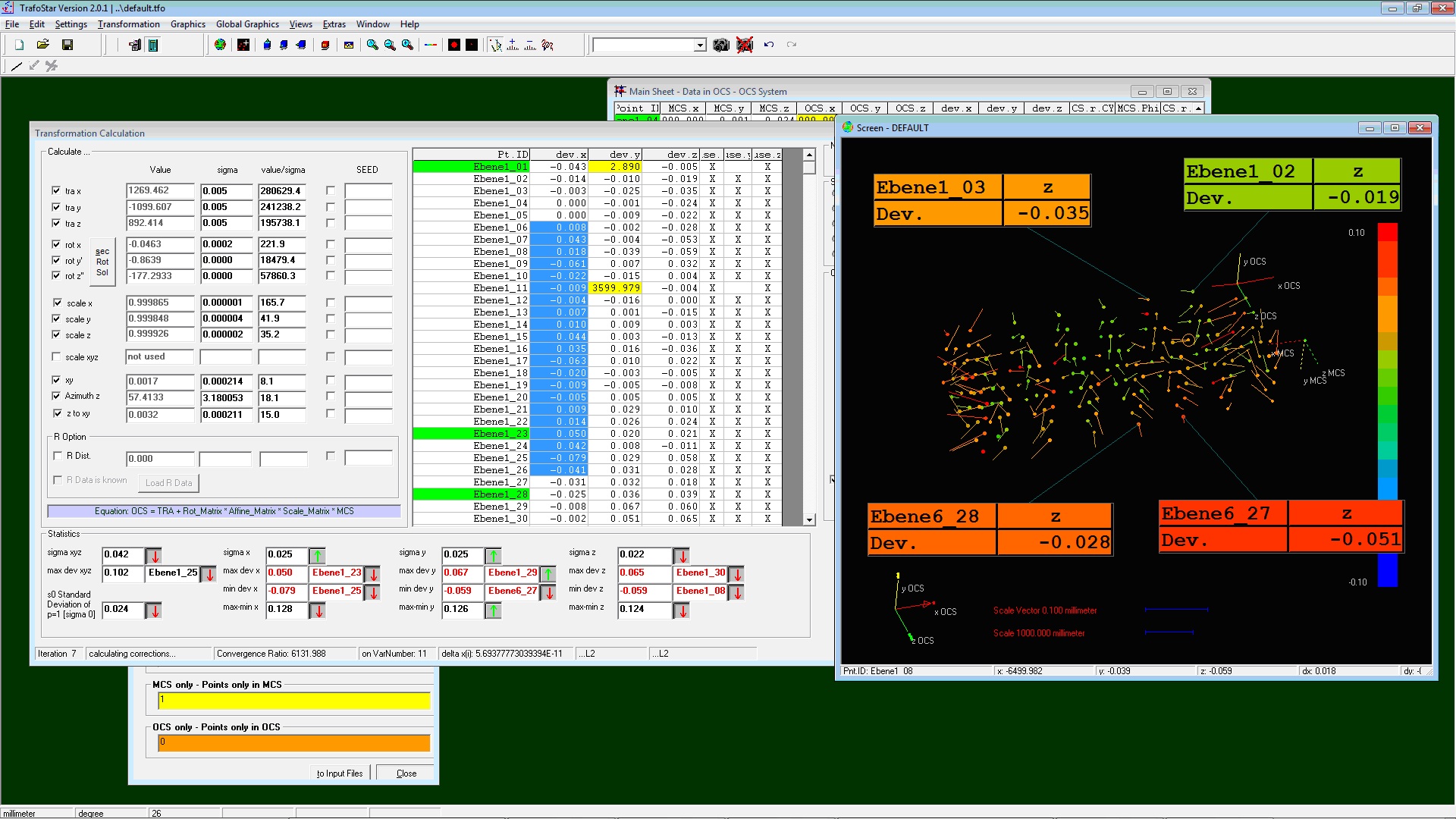
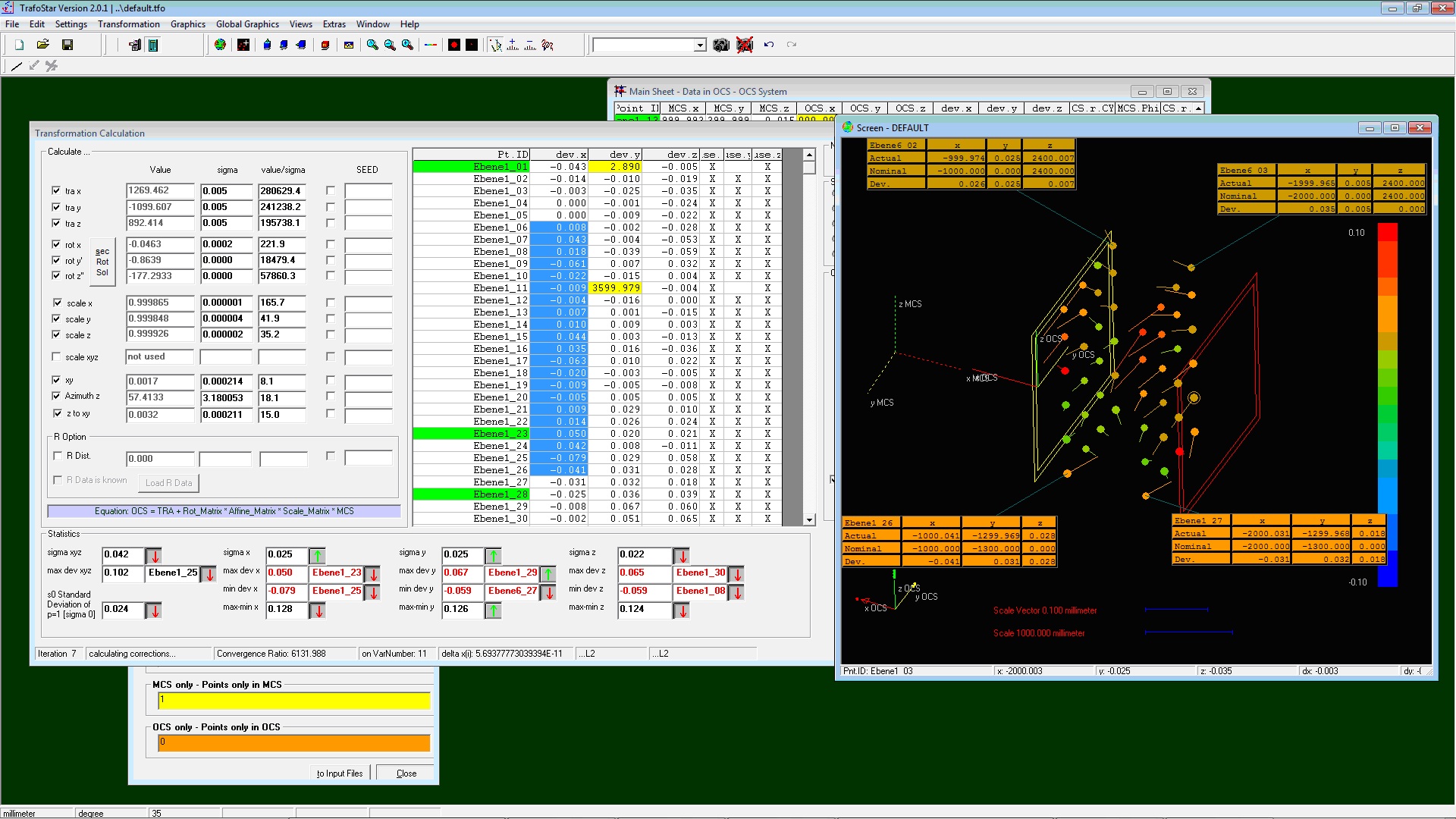
Calculate translations, rotations, scale parameters and additional transformation options for demanding 3D alignment tasks.
Flexible up to 13 Parameter 3D-BestFit Transformations
Software for coordinate transformations, 3D BestFit, deviation analysis and graphical evaluation of large measurement point sets.

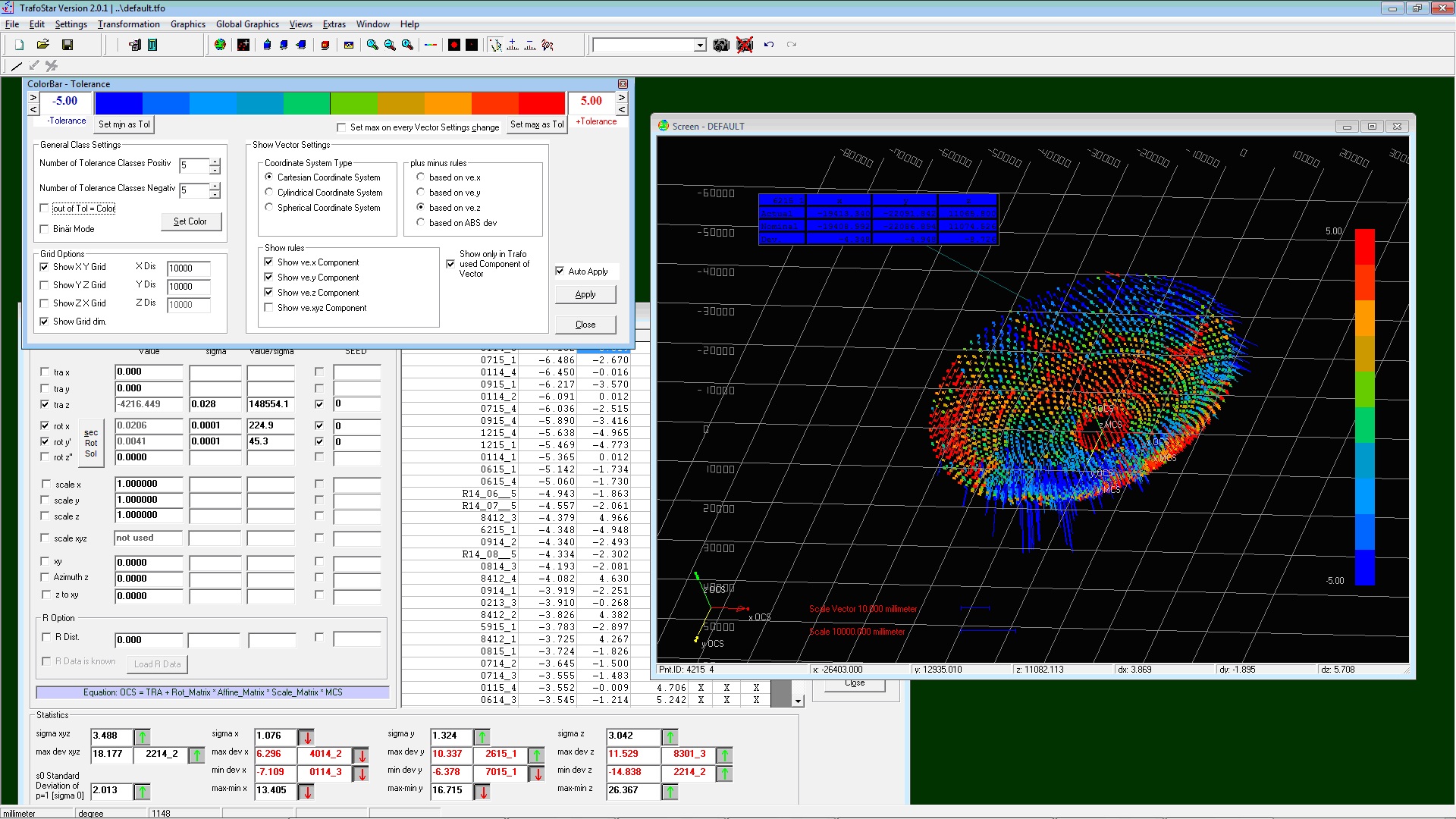
TrafoStar works with measurement coordinate systems and object coordinate systems. It helps compare point sets, calculate transformations and visualize deviations.
Calculate translations, rotations, scale parameters and additional transformation options for demanding 3D alignment tasks.
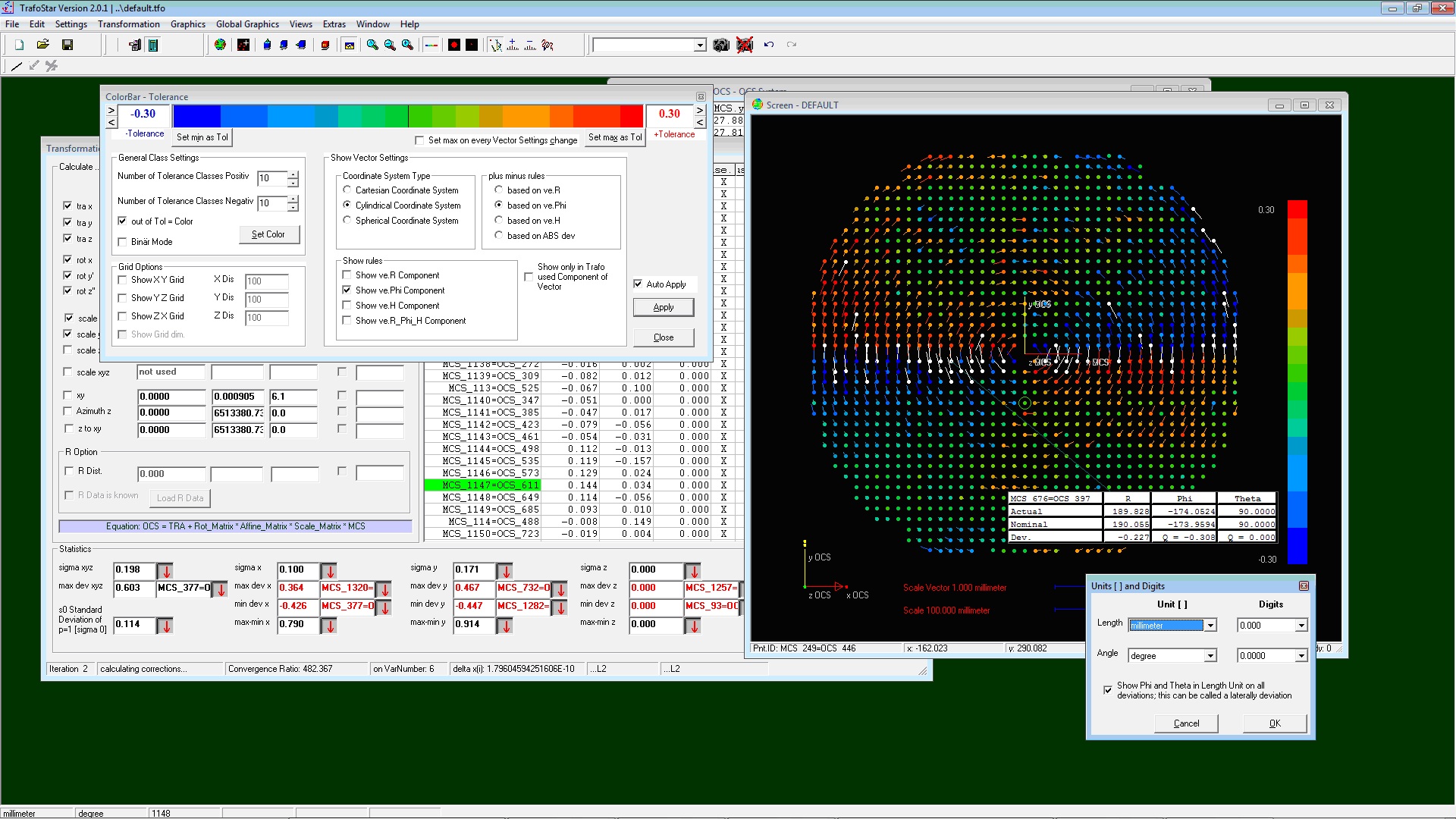
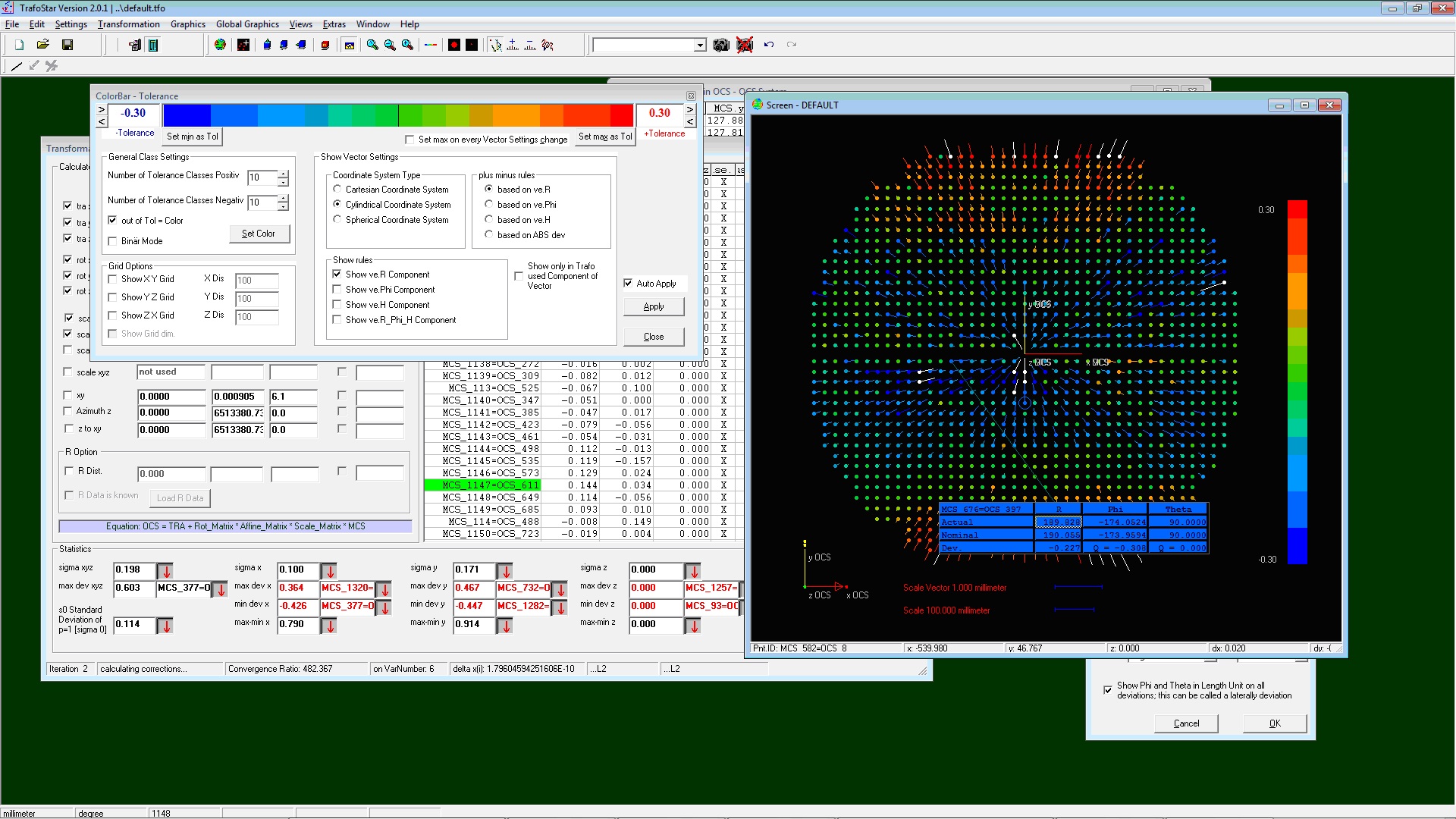
Evaluate deviations in X, Y, Z and vector components with statistics, tables and color-coded graphics.
Display point clouds, deviation vectors, color bars, coordinate systems and graphical information labels.
Also known as 3D BestFit transformation or 3D Helmert transformation.
In many areas and situations coordinates have to be transformed into different coordinate systems. This task can be performed by using simple mathematical methods. The conversion of the task is the determination of transformation parameters from coordinates of points that exist in two different coordinate systems, also called identical points. If more points exist than are necessary for the uniqueness of the calculation, this overdetermination creates an equalisation problem.
TrafoStar is an extremely flexible tool for determining transformation parameters and the residuals resulting from the equalisation.
TrafoStar receives two datasets as data input with the information: point number, x, y and z coordinate in form of ASCII-files. Alternatively an entry directly from the clipboard is possible. The calculation of the 3D transformation can be performed with outstanding flexibility:
560.00 Euros / license